
数据结构12-平方阶排序算法
平方阶排序算法
基本概念
度量指标
- 时间复杂度
- 空间复杂度
- 排序算法的稳定性:Ri和Rj关键词相同,排序前顺序与排序后一致则稳定,否则不稳定
分类
从存储设备角度
- 内排序:排序过程中所有数据元素都在内存中
- 外排序:当待排序元素所占空间大到内存放不下时,排序必须借助外存完成
对关键词的操作
- 基于关键词比较的排序
- 分布排序:基于元素的分布规律
按时间复杂度:
- 平方阶算法:算法简单,平均时间复杂度O(n^2)
- 线性对数阶算法:相对复杂,平均时间复杂度O(nlogn)
- 线性算法:不依赖关键词排序,需要已知元素的分布规律
直接插入排序
把第i个元素插入到前n-1个元素中
1 | void InsertionSort(int R[],int n) |
时间复杂度分析
最好情况:O(n) 已经排好序,每次插入操作Ri只用与前面有序子数组的最后一个元素比较一次
最坏情况:O(n^2)初始为逆序,每次插入操作花费O(n)
平均情况:O(n^2)
稳定性:稳定
冒泡排序
稳定:前面元素大于后面元素才交换,等于不交换
初级冒泡排序算法 O(n^2)
1 | void SimpleBubbleSort(int R[],int n) |
1 | void BubbleSort(int R[],int n) |
最好情况:O(n)
最坏情况:O(n^2)
稳定
直接选择排序
选最大的放后面
1 | void SelectionSort(int R[],int n) |
时间复杂度
最好,最坏,平均 O(n^2);
不稳定
希尔排序
直接插入排序的改进(可以看作直接插入排序plus)
直接插入排序算法在”短文件“,”待排序文件基本有序“时速度快,希尔排序充分利用了这两个特性
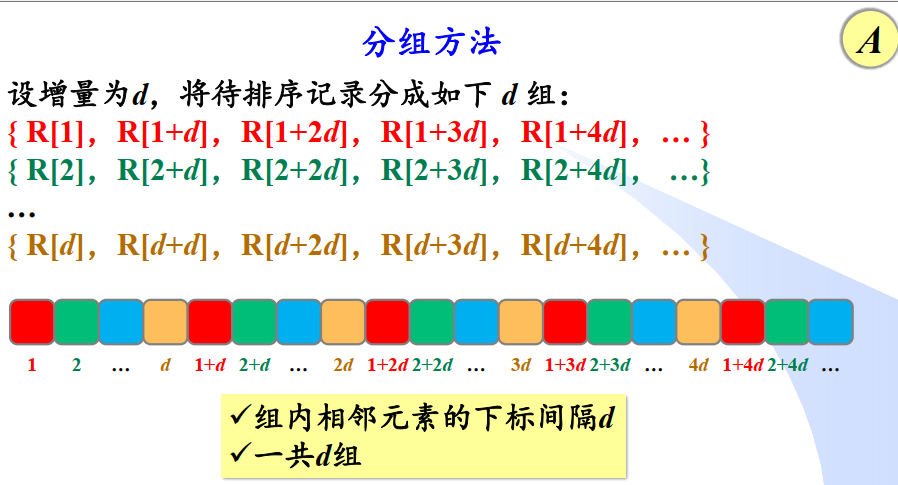
希尔排序基本过程
- 将元素分为d组
- 对每组元素使用直接插入法排序
- 把d值减小,重复执行①②
增量d的一种简单选取方法(以n=10为例)
d1=n/2=5
d2=d1/2=2
d3=d2/2=1
开始时增量大,每组元素少,插入排序速度较快
随着增量逐渐减小,每组元素个数变多,但大多数元素已基本有序,而插入排序在元素接近有序时速度快
一般认为平均时间复杂度在O(n^2)和O(nlogn)之间,与d有很大关系
稳定性:不稳定
1 | void ShellSort(int R[],int n) |
本博客所有文章除特别声明外,均采用 CC BY-NC-SA 4.0 许可协议。转载请注明来自 Bin's blog!